
Hệ thống chuyển tải thùng
Trên một băng tải các thùng chứa đi đến cẩn được nâng lên từng chiếc một và chuyển sang băng tải thứ hai (Hình 1).
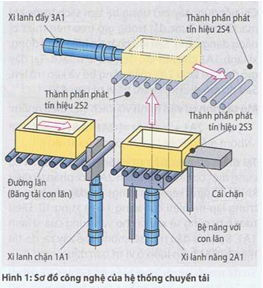
Các thùng chứa đến từ băng tải phía dưới bị xi lanh chặn 1A1 giữ lại. Sau khi phát ra tín hiệu khởi động 1S3, xi lanh chặn rút xuống và thùng được đưa vào bệ nâng. Tại đây sẽ phát động tín hiệu 2S3. Xi lanh 1A1 lại chạy lên vị trí chặn, xi lanh nâng 2A1 nâng thùng lên. Tại vị trí cuối sẽ tác động xi lanh đẩy 3A1, và đẩy thùng vào băng tải phía trên. Sau đó cả hai xi lanh 2A1 và 3A1 chạy trở về. Chu kỳ hoạt động kết thúc.
GRAFCET (Hình 2).

Quá trình chuyển động của xi lanh có thể mô tả một cách tổng quan bằng GRAFCET (Trang 476).
Trong phần cấu trúc người ta có thể đọc được từng bước điều khiển. Chúng được thay đổi luân phiên bởi các chuyển tiếp.
Trong phẩn tác động, mỗi bước của quá trình mô tả một hoặc nhiều hành động được ghi trong ô chữ nhật. Không cẩn mô tả quá trình chạy vào của xi lanh đẩy 3A1, do ngay sau khi hoàn tất sự vận chuyển (Điều kiện chuyển tiếp 4) với 2S4, xi lanh 3A1 lập tức chạy vào vì cùng sử dụng một phẩn tử tác chỉnh ổn định đơn 3V1.

Sơ đồ mạch (Hình 3). Sơ đồ mạch minh họa sự liên kết của tất cả các phẩn tử trong hệ điều khiển. Do các phẩn tử được mô tả bằng các ký hiệu cho nên quá trình điểu khiển chỉ có thể theo dõi bằng cách suy nghĩ một cách có hệ thống. Muốn “đọc” được sơ đồ mạch phải học và thực hành. Chỉ như thế mới có thể hiểu cách cấu tạo và ứng dụng đúng các chức năng trong hệ điều khiển.
Cấp chi tiết cho hệ thống làm sạch
Sơ đồ công nghệ (Hình 1) và mô tả chức năng
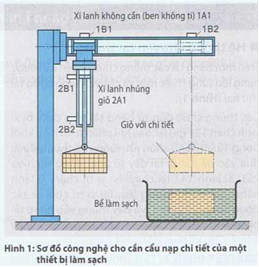
Chi tiết được tẩy mỡ trong bể làm sạch trước khi mạ. Chi tiết được đặt trong giỏ treo trên thiết bị nâng dạng cổng. Sau khi phát tín hiệu khởi động, xi lanh 1A1 chuyển giỏ đến bể làm sạch. Tại đây giỏ được xi lanh 2A1 thả xuống bể và kéo trở lên. Sau đó giỏ di chuyển trở vể vị trí ban đẩu.
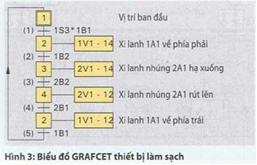
Mô tả trình tự vận hành với cách viết theo nhóm:
![]()
Tại điểm chuyển tiếp từ nhóm I đến nhóm II có cùng một cơ cấu chấp hành 2A1 với phần tử điểu khiển ổn định kép (van xung).Tại đây sẽ xảy ra sự trùng lặp tín hiệu của xung 14 và xung 12. Điều tương tự cũng sẽ xảy ra cho van xung của xi lanh 1 AI. Sự khởi đẩu mới sẽ không thể xảy ra, do tín hiệu từ 2B1 luôn luôn ở vị trí ban đầu.
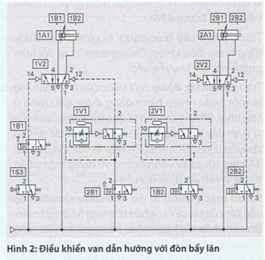
Sơ đồ mạch (Hình 2) và biểu đồ GRAFCET (Hình 3)
. Tín hiệu của cảm biến tiệm cận khí nén 1B2 khởi động chuyển động đi xuống của xi lanh, tín hiệu này không được phép tiếp tục tổn tại khi xi lanh 2A1 phải đi lên trở lại, nếu không, hai tín hiệu sẽ hiện hữu tại phẩn tử tác chỉnh 2V2 (= tín hiệu trùng lặp). Vì thế van 2V1 được trang bị chức năng thời gian để đóng lại sau 1 giây (Trang 492). Sự trùng lặp tín hiệu thứ hai (bước cuối cùng và khởi động mới) cũng được tránh bằng chức năng thời gian (bộ định thời) 1VI.
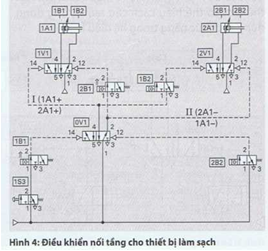
Điều khiển nối tầng (điều khiển trước – sau, điểu khiển liên tiếp) (Hình 4).
Một phương pháp hữu hiệu nhằm tránh sự trùng lặp tín hiệu trong điều khiển khí nén khi sử dụng van xung là sử dụng van chuyển đổi 0V1, cung cấp áp suất cho cả hai nhánh điểu khiển I và II tại thời điểm xác định, do đó chỉ có những phần tử tín hiệu cần thiết của quá trình mới được cấp khí nén. Các phẩn tử tín hiệu khác không nhận được năng lượng.

















{kind=link}