
Cấu tạo động học của RBCN được xác định qua cách bố trí, loại và số trục tham gia vào chuyển động. Trục là những phẩn tử chuyển động của robot được điều khiển và được truyền động không lệ thuộc vào nhau.
Người ta phân biệt:
Trục quay: Với trục quay thì chuyển động quay nhanh có thể được thực hiện trong những khớp quay (khớp các đăng) AI tới A6 (Hình 2).
Trục tịnh tiến: Với trục tịnh tiến thì trục chuyển động có thể là đường thẳng, tuyến tính song song với những trục tọa độ X, Y và z.
Loại kết cấu và những khả năng chuyển động (= động học) của robot cũng như sự hiện diện của các chuyển động quay (R) hoặc tịnh tiến (T) của trục chính robot xác định không gian có thể hoạt động (Hình 1). Không gian có thể ở dạng hình trụ, hình cẩu và hình hộp thẳng. Dạng kết hợp giữa các phần tử cơ bản này được gọi là dạng lai: thí dụ không gian hoạt động của loại Scara1.
1) Scara là chữ viết tắt của tiếng Anh: selective compliance assembly robot arm =Tay máy mém dẻo tùy ý để láp ráp
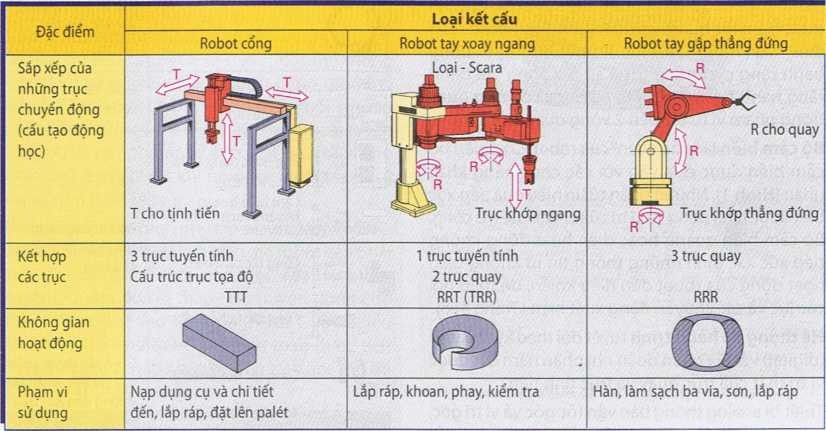
Hình 1: Loại kết cấu và phạm vi đưa vào sử dụng của robot công nghiệp
Từ loại kết cấu cho ra kết quả về tính năng công suất của RBCN:
Số trục chuyển động. Robot có càng nhiều trục (khớp) thì càng linh động hơn. Bậc tự do cao nhất f = 6 đòi hỏi tối thiểu là 6 trục chuyển động.
Không gian hoạt động. Mô tả khả năng không gian di chuyển. Không gian hoạt động được tạo thành từ những vùng di chuyển của tất cả trục và đổng thời diễn tả những phạm vi nguy hiểm cho người sử dụng và bảo trì rôbot.
Tải trọng danh nghĩa. Luôn luôn nhỏ hơn tải trọng cho phép tối đa và có thể được di chuyển với vận tốc không giới hạn.
Vận tốc. Được tổng hợp theo thành phẩn từ các chuyển động của trục.
Độ chính xác lặp lại. Độ lệch tối đa phát sinh bởi sự lặp lại việc tiếp cận tại một vị trí với những điểu kiện giống nhau và ở trong phạm vi ± 0,01 mm và ± 2mm.
Độ chính xác định vị. Độ lệch tối đa khi định vị của tải trọng danh nghĩa.
Đặc thù và đặc trưng của RBCN được xác định bởi đặc điểm về công suất của nó: số trục chuyển động, độ chính xác định vị và độ chính xác lặp lại cũng như vận tốc.
Robot cổng được bố trí theo dạng cẩu đi qua không gian hoạt động. Đặc biệt phù hợp cho những đường di chuyển dài và chuyển động nhanh với tải trọng lớn.
Robot cánh tay xoay ngang được sử dụng chủ yếu làm robot lắp ráp. Nó có độ bền vững lớn trong trục thẳng đứng và có thể di chuyển nhanh theo chiều ngang. Theo nguyên tắc kết cấu thì loại này giống cánh tay người nhất.
Robot cánh tay gập thẳng đứng cũng được gọi là robot khớp vì loại cấu tạo của nó. Lợi điểm là có không gian hoạt động tương đối lớn so với kích cỡ của nó, chuyển động nhanh và việc chỉnh thẳng bất kỳ của tay kẹp hoặc dụng cụ trong không gian. Vì sự linh hoạt của loại rôbot này nên người ta đưa vào sử dụng nhiều trong những công việc hàn và sơn. Loại robot này được sử dụng rộng rãi cho việc xử lý và gia công nên được xem là robot vạn năng.



















{kind=link}